Stereo Depth Estimation : Python/OpenCV2 C++/DirectX11
Colab Link : https://colab.research.google.com/drive/1Ey4mfWyh3wSpEplk6TY8eJepNdbtIoJn?usp=sharing
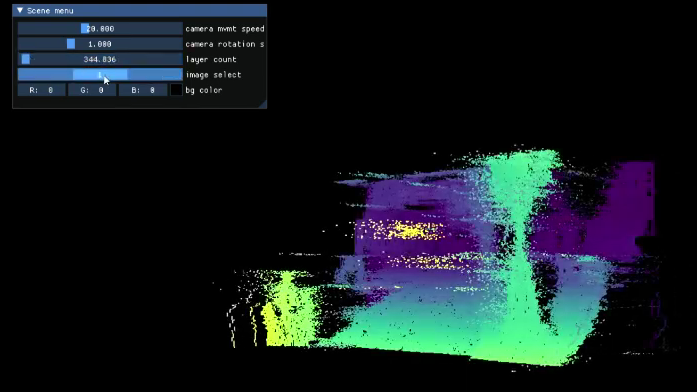
Showcase Video Of Point Cloud Visualizer
[Note : This was a group project of 5. The techniques noted below are my personal contributions towards the project]
Features
- Implemented Morphological transforms such as Hit or Miss transform, Erosion, Dilation, Opening, Closing, Template Matching.
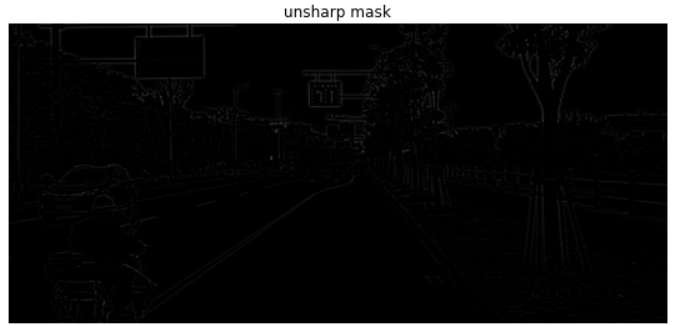
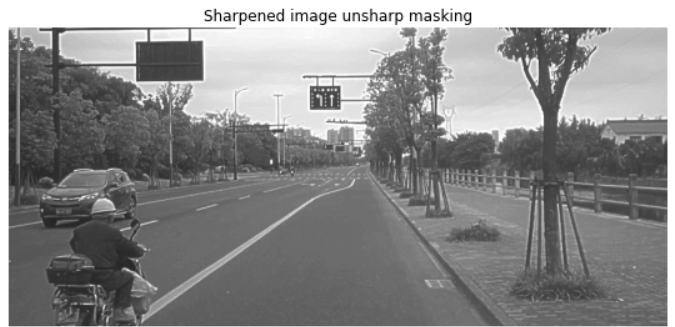
- Added several edge detection algorithms such as Sorbel edge detectors, Laplacian edge detectors, and Unsharp masking.
- Disparity/Depth map generation by extracting relevant camera calibration data.
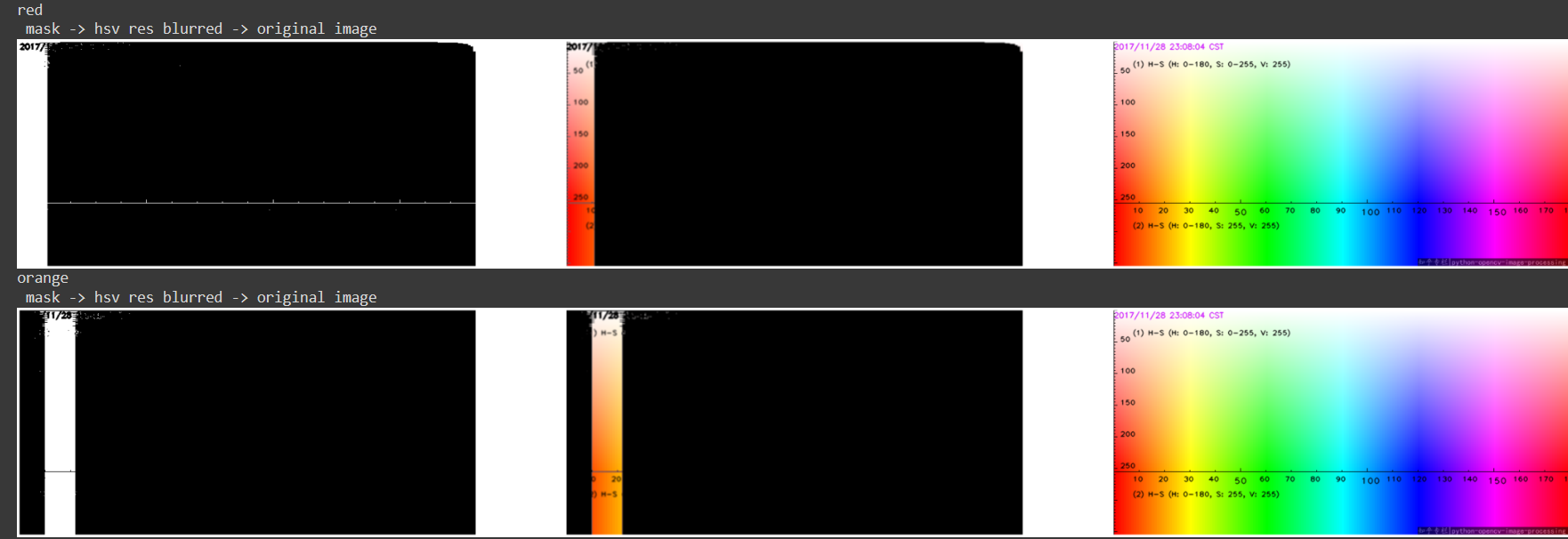
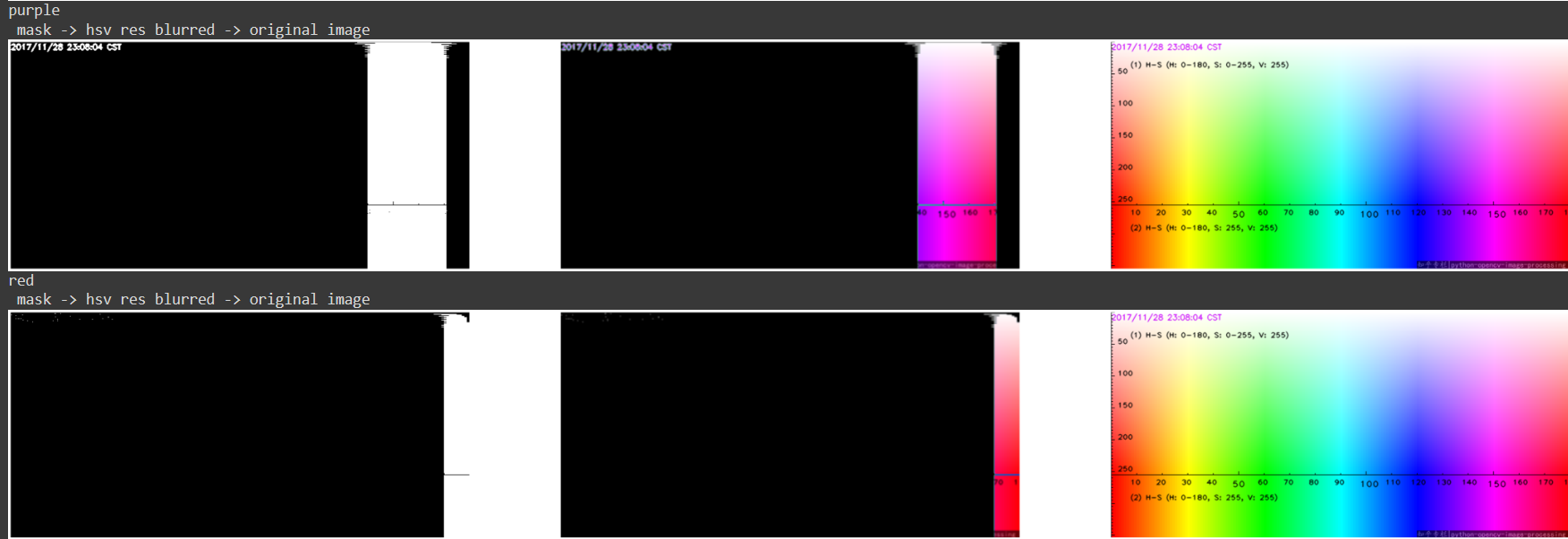
- Implemented segmentation algorithms such as WaterShed segmentation and Colour space segmentation (HSV).
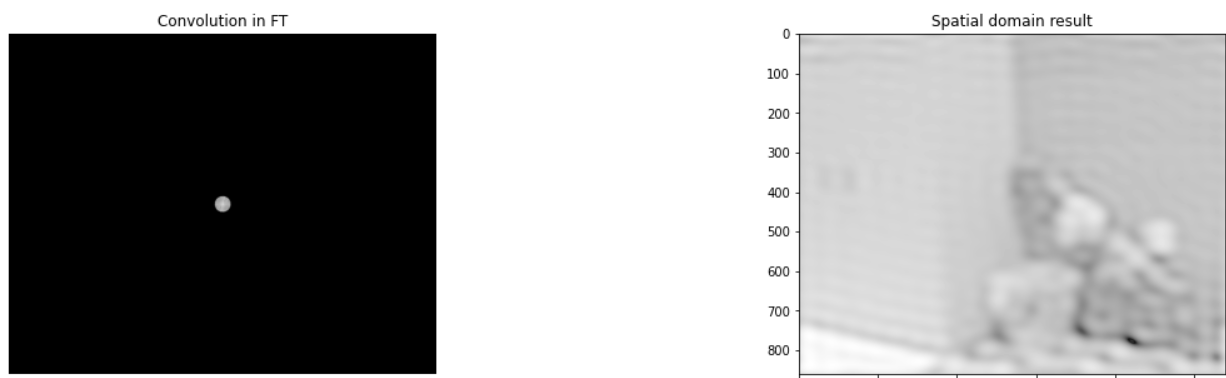
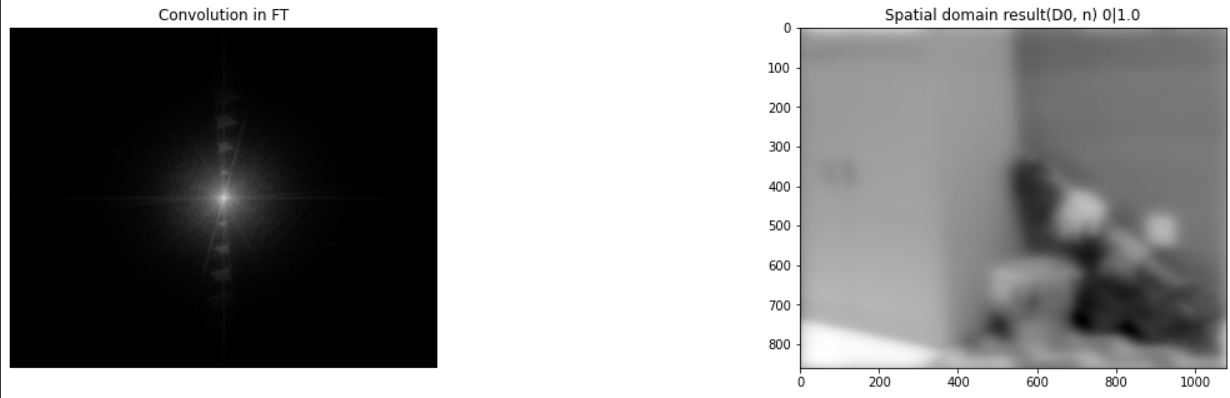
- For pre-processing of images, implemented frequency domain filters such as Butterworth’s low/high pass filter, Ideal low/high pass filter
- Created a C++/DirectX11 application to represent the depth map in form of a point cloud visualizer.
Spatial Domain Sharpening Filters
Source / Original Image
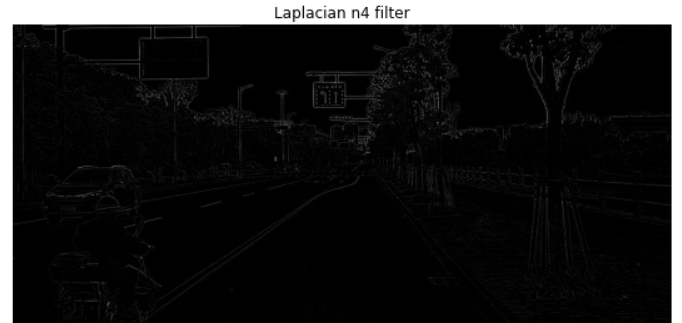
N4 Laplacian Mask / Sharpened Image
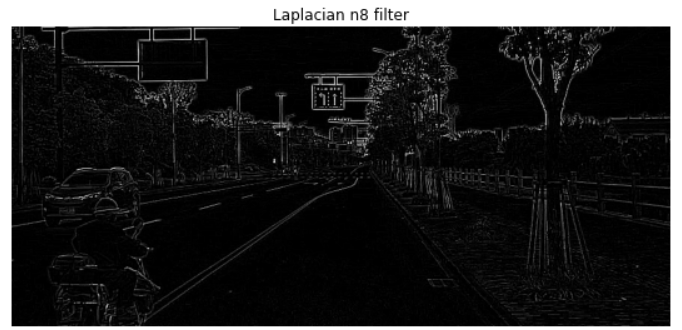
N8 Laplacian Mask / Sharpened Image
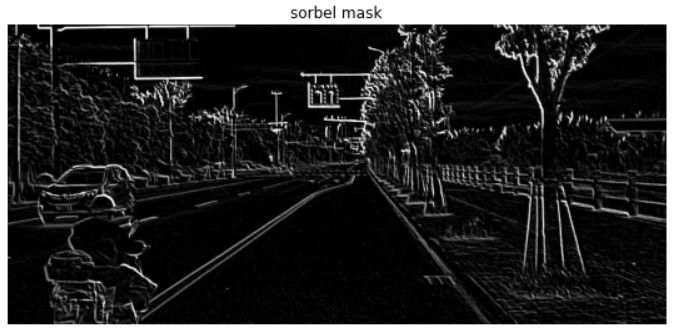
Sorbel Mask / Sharpened Image
Unsharp Masking Mask / Sharpened Image
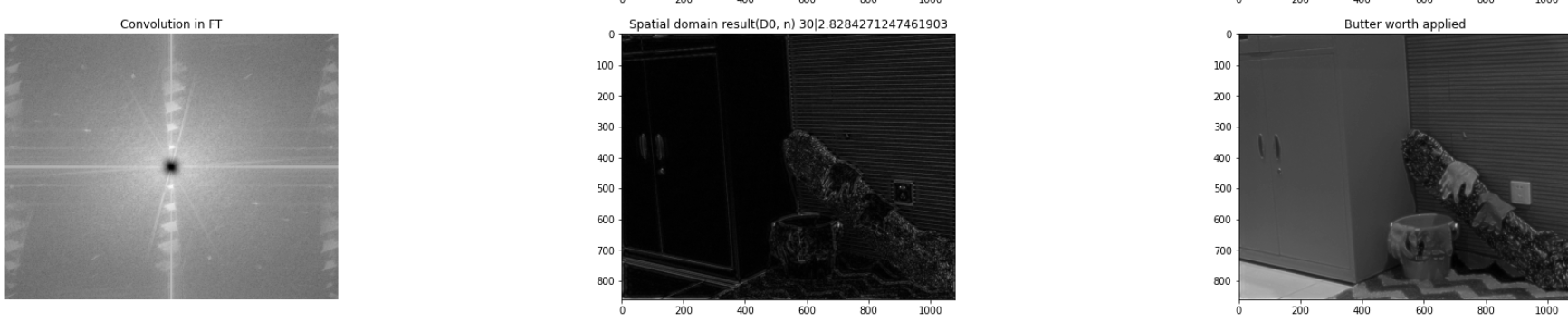
Frequency Domain Blurring / Sharpening Filters
Ideal Low and High Pass Filter Masks
Application of Ideal Low and High Pass Filters


Application of ButterWorth’s Low and High Pass Filters
Other Image Processing Techniques
Color Space Segmentation (HSV)
Homomorphic Transformations

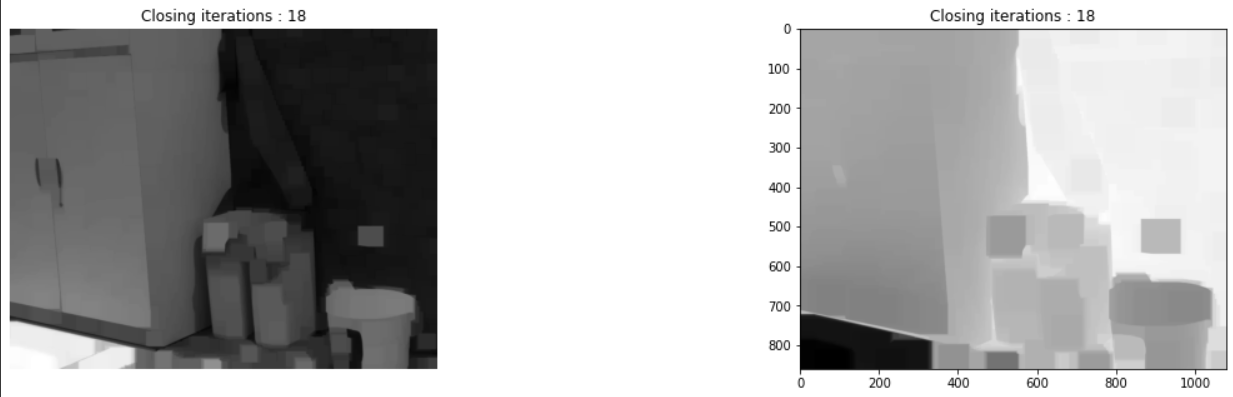
Morphological Closing
Hit or Miss Transform (object to hit : The 2 wheeler Driver)
Template Matching

Disparity and Depth Map Generation

